 平台热线
平台热线





发那科常用型号如下:
精密、小型机器人:LR MATE 200iD系列、M-10iA(老型号)、M-20iA(老型号)、M-10iD、M-20iD
中型机器人:M-410iC系列、M-710iC系列
大型机器人:R-2000iC/165F、R-2000iC/210F
我们是一家智能制造一站式综合 服务商,专注于机器人、智能装备、自动化设备以及周边核心配套部件等产品集科研、设计、营销、技术服务、产业互联网、进出口贸易于一体的大型的科技公司。
POSITION屏幕以关节角度或直角坐标系显示位置信息。随着机器人的运动,屏幕上的位置信息不断地动态更新。屏幕上的位置信息只是用来显示的,不能修改。
注意:
如果系统中安装了扩展轴,E1,E2,以及E3表示扩展轴位置信息。
显示位置状态:
步骤:
按下[POSN ]键。
选择适当的坐标系:
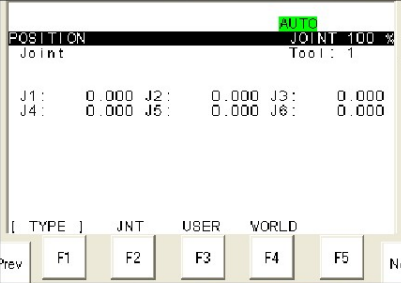
按F2[JNT],将看到如下的类似屏幕:
Tool:表示当前使用的工具坐标号;
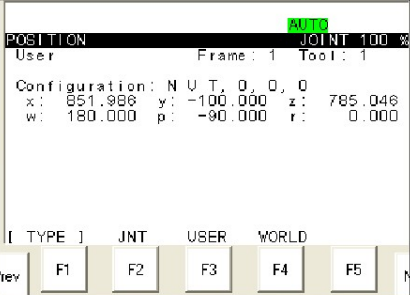
按F3[USER],将看到如"下的类似屏幕:
Tool:表示当前使用的工具坐标号;
frame: 表示当前使用的用户坐标系号;
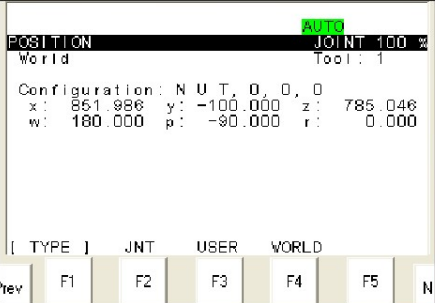
按F4[WORLD]将看到如下的类似屏幕:
以上内容来源于:网络
侵权删
更多机器人资讯请咨询:发那科机器人

